
4G DTU/路由器")


城市街景測繪應用
城市街景測繪的前提是測繪儀器的高精度位置、姿態(tài)、航向基準,關(guān)鍵部件是高精度北斗/慣性組合導航系統。
1. 城市街景測繪基本原理
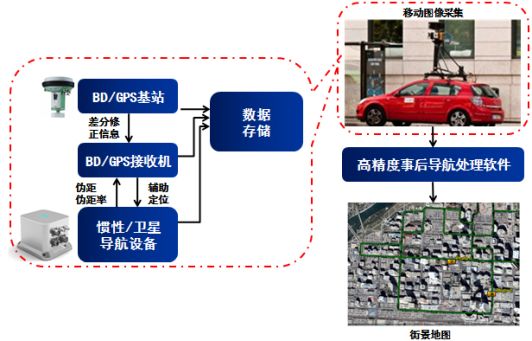
城市街景測繪的前提是測繪儀器的高精度位置、姿態(tài)、航向基準,關(guān)鍵部件是高精度北斗/慣性組合導航系統。
2. 城市街景測繪應用挑戰
(1)城市測繪由二維到三維轉變
(2)測繪需求由一級城市到二、三級城市擴散
(3)由開(kāi)闊場(chǎng)地向峽谷、遮擋區擴散
(4)測繪物由一般街道向小形建筑深入細化
(5)由靜態(tài)測量向動(dòng)態(tài)測量轉變
(6)精度由米及向亞米級、厘米級發(fā)展
3. 高精度北斗/光纖慣性組合導航系統應用于車(chē)載式測繪系統
(1)系統產(chǎn)品參數

全球覆蓋:突破了衛星導航在遮擋地區的使用限制
全天候:慣性技術(shù)自主性保障惡劣環(huán)境下可靠運行
高精度:實(shí)時(shí)差分和事后差分,位置精度達厘米級
高可靠性:MTBF>35,000小時(shí)
多模式:支持單、雙天線(xiàn)及純慣導三種工作模式
雙模態(tài):支持北斗、GNSS雙模態(tài)
全參數:除衛星導航的位置信息外,還可提供航向、姿態(tài)信息
后處理:慣性/GNSS組合導航、慣性/里程計組合導航以及POS后處理功能
自組合、自標定:在無(wú)GPS輔助的情況下,憑借里程計慣性導航的組合可獲得2~3‰(行駛里程)的定位精度
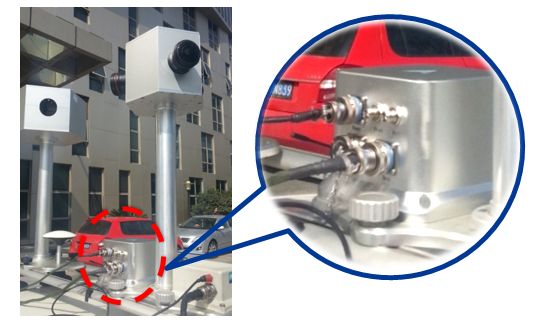
(2)北斗/光纖慣性組合產(chǎn)品安裝于測試車(chē)輛上
(3)測量結果示例
中關(guān)村GPS測量結果

上海高架橋—組合導航測試結果

上海海底隧道--GPS測試結果

4. 高精度北斗/ MEMS慣性組合導航系統應用于便攜式測繪系統
(1)系統產(chǎn)品參數

全球覆蓋:突破了衛星導航在遮擋地區的使用限制
全天候:慣性技術(shù)自主性保障惡劣環(huán)境下可靠運行
高精度:實(shí)時(shí)差分和事后差分,位置精度達厘米級
高可靠性:MTBF>35,000小時(shí)
多模式:支持單、雙天線(xiàn)及純慣導三種工作模式
雙模態(tài):支持北斗、GNSS雙模態(tài)
全參數:除衛星導航的位置信息外,還可提供航向、姿態(tài)信息
(2)測量結果示例
上海高架橋--MEMS組合導航系統測量結果曲線(xiàn)

5. 突破的主要關(guān)鍵技術(shù)
北斗/INS高精度后處理算法
里程計自動(dòng)識別、刻度系數自估計、自動(dòng)組合導航算法
在多路徑干擾環(huán)境中的智能識別并隔離精度較差的北斗定位信號
INS高精度標定技術(shù)
關(guān)鍵詞:
相關(guān)方案

暫無(wú)數據


